Una parte importante della convalida dell'apparecchiatura è l'esecuzione di indagini sull'uniformità della temperatura (TUS) e di test di accuratezza del sistema (SAT); ma prima è necessario sapere come configurare correttamente l'apparecchiatura.
Che cos'è la sintonizzazione PID?
Un controllore proporzionale-integrale-derivativo (PID) viene utilizzato per garantire che la temperatura del forno durante un ciclo di riscaldamento rimanga il più vicino possibile alla temperatura nominale per il tasso e la quantità di variazione desiderati.
Capire la regolazione del PID
Regolando le tre impostazioni di base - proporzionale, integrale e derivata - l'utente può garantire che il forno raggiunga e mantenga la temperatura di set point desiderata. La componente proporzionale (P) modifica la variabile di processo, che è un rapporto diretto dell'errore di controllo. La componente integrale (I) viene utilizzata per eliminare l'offset e modifica la temperatura in proporzione all'errore integrato. La componente derivativa (D) viene utilizzata per stabilizzare il sistema o accelerarne la risposta e modifica la temperatura in proporzione alla derivata della variabile di processo.
Variabile di processo - la variabile che si sta manipolando; in questo caso, la temperatura effettiva del forno
Errore di controllo - la differenza tra la temperatura di set point e la temperatura effettiva
Errore integrato - l'entità e la durata dell'errore di controllo
Derivata della variabile di processo - il tasso di variazione della temperatura effettiva del forno
I regolatori PI sono i più utilizzati nel settore, poiché la combinazione di P e I fornisce in genere i risultati necessari e mantiene le cose semplici. Tuttavia, regolando anche la derivata (D), è possibile ottenere guadagni P e I maggiori mantenendo l'anello stabile, il che si traduce in una risposta più rapida e in migliori prestazioni dell'anello.
Passi per la messa a punto del PID
Durante il processo di regolazione PID, questi sono alcuni passi fondamentali che riteniamo tutti debbano tenere a mente. Naturalmente, i passi da compiere possono variare a seconda del tipo di controllore di cui si dispone. I passaggi che seguono sono indicati tenendo conto di un controllore CompactLogix di Allen Bradley e sono pensati per coloro che non si considerano dei matematici.
- Annotare le impostazioni PID correnti.
- Eseguire un bump test consentendo al forno di eseguire un ciclo completo con le impostazioni PID correnti. A tal fine, il forno deve essere alimentato in modo coerente con i tassi di rampa tipici della produzione e poi deve essere sottoposto a un'immersione intorno al punto di regolazione desiderato.
- Se le impostazioni PID attuali non forniscono i risultati desiderati (ad esempio, oscillazione della variabile di processo [PV] o superamento del set point desiderato), prendere i numeri PID e dimezzarli. Poi eseguite un altro ciclo completo per vedere quali sono i risultati. L'obiettivo è che la temperatura effettiva del forno si avvicini alla temperatura di set point per la velocità e la variazione desiderate. Tuttavia, se si allontana, significa che è necessario raddoppiare le impostazioni PID originali.
- Ripetete questo processo di aggiustamenti graduali fino a raggiungere i risultati desiderati.
Nota: Assicurarsi sempre di lasciare che il forno faccia il suo ciclo e attendere per vedere quale sia la causa e l'effetto prima di effettuare una nuova regolazione.
Per i matematici, ecco una correlazione di regolazione del regolatore PI per ottenere una forma PID ideale:
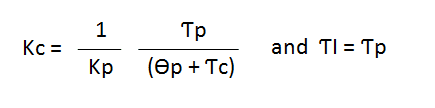
Kc = Guadagno del regolatore (parametro di regolazione)
Kp = Guadagno di processo (fino a che punto)
Өp = Tempo morto (quanto ritardo)
Ƭp = Costante di tempo (quanto veloce)
Ƭc = Costante di tempo ad anello chiuso
ƬI = Tempo di reset (parametro di sintonizzazione)

Quando si utilizza questa correlazione di regolazione, è necessario tenere conto anche delle dimensioni della termocoppia rispetto alle prestazioni, utilizzando queste regole:
- Aggressivo: Ƭc è il maggiore tra 0,1 Ƭp o 0,8 Өp (per applicazioni a bassa temperatura <800 °F)
- Moderato: Ƭc è il maggiore tra 1,0 Ƭp e 8,0 Өp (per applicazioni a temperature più elevate >800 °F)
La regolazione PID può spesso essere un processo di tentativi ed errori. Tuttavia, comprendendo come i tre componenti di base si relazionano tra loro e influiscono sul risultato desiderato, nonché tenendo a mente alcuni passaggi fondamentali, questo processo sarà notevolmente semplificato.
Se avete bisogno di ulteriore assistenza per la messa a punto del PID, contattate Ipsen all'indirizzo 1-844-GO-IPSEN.