装置を検証する上で重要なのは、温度均一性調査(TUS)とシステム精度試験(SAT)を実施することですが、まずは装置を適切に構成する方法を知っておく必要があります。
PIDチューニングとは?
比例-積分-微分(PID)制御装置は、加熱サイクル中の炉の温度が、所望の割合と変動量に対して設定点温度に可能な限り近づくようにするために使用されます。
PIDチューニングを理解する
比例、積分、微分の3つの基本設定を調整することで、ユーザーは炉が目的の設定温度に到達し、維持することを確実にすることができます。比例成分 (P) はプロセス変数を変化させるもので、制御誤差の正比例となります。積分 (I) コンポーネントはオフセットの除去に使用され、積分誤差に比例して温度を変化させます。微分(D)コンポーネントは、システムを安定させたり、応答を速めたりするために使用され、プロセス変数の微分に比例して温度を変化させる。
プロセス変数 - この場合は、炉の実際の温度である。
コントロールエラー - 設定温度と実際の温度の差
統合エラー - 制御誤差の大きさと時間
プロセス変数の微分 - 炉の実温度の変化率
PIコントローラーは、PとIの組み合わせで必要な結果が得られ、シンプルに保たれるため、業界で最も一般的に使用されています。しかし、微分(D)もチューニングすることで、ループを安定させたまま、より大きなPとIのゲインを得ることができます。
PIDチューニングのステップ
PIDチューニングのプロセスにおいて、誰もが覚えておくべきと思われるいくつかの基本的なステップをご紹介します。もちろん、コントローラのタイプによって、取るべき手順は異なります。以下の手順は、Allen Bradley CompactLogix コントローラを念頭 に置き、数学者でないと思われる方のために設計されています。
- 現在のPID設定を書き出す。
- 現在の PID 設定で炉をフルサイクルさせてバンプテストを行います。この場合、通常の生産量に見合ったランプ速度で炉を上昇させ、希望の設定点付近でソークアウトさせます。
- 現在の PID 設定で望ましい結果が得られない場合 (例えば、プロセス変数 [PV] の振動や、望ましいセットポイントのオーバーシュート)、PID 数値を半分にします。その後、もう一回全サイクルを実行し、結果を確認します。その結果、炉の実温度が設定温度に近づいていることを確認します。しかし、もし遠ざかるようであれば、元のPID設定を2倍にする必要があります。
- 希望する結果に達するまで、少しずつ調整するこのプロセスを繰り返す。
注:炉を循環させ、原因と結果を確認してから再度調整するようにしてください。
数学者の方のために、理想的なPIDの形を達成するためのPIコントローラーのチューニングの相関関係をご紹介します:
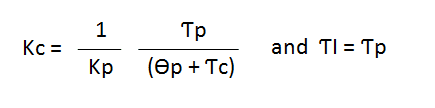
Kc = コントローラゲイン(チューニングパラメータ)
Kp = プロセスゲイン(どこまで)
Өp = =. デッドタイム(遅延時間)
Ƭp = 時定数(どのくらいの速さか)
Ƭc = 閉ループ時定数
Ƭ リセット時間(チューニング・パラメーター)

このチューニング相関を利用する際には、これらの規則を用いて熱電対のサイズ対性能も考慮する必要がある:
- アグレッシブ: Ƭは0.1 Ƭpまたは0.8 Ƭpの大きい方(800 °F以下の低温用途向け)
- 中程度: Ƭは1.0 Ƭpまたは8.0 Ƭpの大きい方(800 °Fを超える高温用途向け)
PIDチューニングはしばしば試行錯誤のプロセスになる。しかし、3つの基本的な構成要素が互いにどのように関係し、望ましい結果にどのような影響を与えるかを理解し、いくつかの基本的な手順を覚えておくことで、このプロセスは大幅に簡素化される。
PID チューニングでさらにサポートが必要な場合は、Ipsen までご連絡ください。 1-844-GO-IPSEN.