Une partie importante de la validation de votre équipement consiste à réaliser des études d'uniformité de la température (TUS) et des tests de précision du système (SAT), mais vous devez d'abord savoir comment configurer correctement votre équipement.
Qu'est-ce que le réglage PID ?
Un régulateur proportionnel-intégral-dérivé (PID) est utilisé pour s'assurer que la température du four pendant un cycle de chauffage reste aussi proche que possible de la température de consigne pour le taux et la quantité de variation souhaités.
Comprendre le réglage du PID
En réglant les trois paramètres de base - proportionnel, intégral et dérivé - les utilisateurs peuvent s'assurer que le four atteint et maintient la température de consigne souhaitée. La composante proportionnelle (P) modifie la variable du processus, qui est un rapport direct de l'erreur de contrôle. La composante intégrale (I) est utilisée pour éliminer le décalage et modifie la température proportionnellement à l'erreur intégrée. La composante dérivée (D) est utilisée pour stabiliser le système ou accélérer sa réponse et modifie la température proportionnellement à la dérivée de la variable de processus.
Variable de processus - la variable manipulée ; dans ce cas, la température réelle du four
Erreur de contrôle - la différence entre la température de consigne et la température réelle
Erreur intégrée - l'ampleur et la durée de l'erreur de contrôle
Dérivée de la variable de processus - le taux de variation de la température réelle du four
Les régulateurs PI sont les plus couramment utilisés dans l'industrie, car la combinaison de P et I fournit généralement les résultats nécessaires et reste simple. Cependant, en réglant également la dérivée (D), il est possible d'obtenir des gains P et I plus importants tout en maintenant la boucle stable, ce qui permet d'obtenir une réponse plus rapide et d'améliorer les performances de la boucle.
Etapes du réglage du PID
Au cours du processus de réglage du PID, voici quelques étapes de base que nous pensons que tout le monde devrait garder à l'esprit. Bien entendu, les étapes à suivre peuvent varier en fonction du type de contrôleur dont vous disposez. Les étapes suivantes sont données en tenant compte d'un contrôleur Allen Bradley CompactLogix et sont conçues pour ceux qui se considèrent comme des non-mathématiciens.
- Notez vos paramètres PID actuels.
- Effectuez un test de déclenchement en permettant au four d'effectuer un cycle complet avec vos paramètres PID actuels. Pour ce faire, vous devez faire monter en puissance le four d'une manière compatible avec les taux de montée en puissance de votre production typique, puis le faire tremper autour du point de consigne souhaité.
- Si les réglages PID actuels ne donnent pas les résultats souhaités (par exemple, oscillation de la variable de procédé [PV] ou dépassement du point de consigne souhaité), prenez vos chiffres PID et divisez-les par deux. Exécutez ensuite un autre cycle complet pour voir quels sont les résultats. Ce que vous voulez voir, c'est que la température réelle du four se rapproche de la température de consigne pour le taux et la variation souhaités. En revanche, si elle s'en éloigne, cela signifie que vous devriez plutôt doubler vos paramètres PID initiaux.
- Répétez ce processus d'ajustement progressif jusqu'à ce que vous obteniez les résultats souhaités.
Note: Veillez toujours à laisser le four fonctionner et à attendre de voir la cause et l'effet avant de procéder à un autre réglage.
Pour ceux d'entre vous qui sont mathématiciens, voici une corrélation de réglage du contrôleur PI pour obtenir une forme PID idéale :
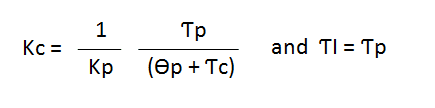
Kc = Gain du contrôleur (paramètre de réglage)
Kp = Gain de processus (dans quelle mesure)
Өp = Temps mort (combien de temps)
Ƭp = Constante de temps (vitesse)
Ƭc = Constante de temps de la boucle fermée
ƬI = Temps de réinitialisation (paramètre de réglage)

Lorsque vous utilisez cette corrélation de réglage, vous devez également tenir compte de la taille du thermocouple par rapport à la performance en utilisant ces règles :
- Agressif : Ƭc est le plus grand de 0,1 Ƭp ou 0,8 Өp (pour les applications à basse température <800 °F).
- Modéré : Ƭc est la valeur la plus élevée entre 1,0 Ƭp et 8,0 Өp (pour les applications à haute température >800 °F).
Le réglage du PID peut souvent être un processus d'essais et d'erreurs. Mais en comprenant comment les trois composants de base sont liés les uns aux autres et influencent le résultat souhaité, ainsi qu'en gardant à l'esprit quelques étapes de base, ce processus sera considérablement simplifié.
Si vous avez besoin d'une assistance supplémentaire pour le réglage du PID, veuillez contacter Ipsen à l'adresse suivante 1-844-GO-IPSEN.