验证设备的一个重要环节是执行温度均匀性调查 (TUS) 和系统精度测试 (SAT);但首先您必须知道如何正确配置设备。
什么是PID调谐?
比例-积分-衍生(PID)控制器用于帮助确保在一个加热周期内,炉子的温度尽可能地接近所需的变化率和变化量的设定点温度。
了解PID调谐
通过调整三个基本设置--比例、积分和导数--用户可以确保炉子达到并保持理想的设定点温度。比例成分(P)改变过程变量,与控制误差成正比。积分(I)组件用于消除偏移,并按照积分误差的比例改变温度。导数(D)分量用于稳定系统或加速其响应,并按过程变量的导数比例改变温度。
过程变量 - 被操纵的变量;在这种情况下,炉子的实际温度
控制错误 - 设定温度和实际温度之间的差异
综合误差 - 控制误差的大小和持续时间
过程变量的导数 - 炉子实际温度的变化率
PI控制器是行业内最常用的,因为P和I的组合通常能提供必要的结果,并使事情变得简单。然而,通过同时调整导数(D),你可以在保持环路稳定的情况下获得更大的P和I收益,这将导致更快的响应和改善环路性能。
PID调谐的步骤
在PID调谐的过程中,这些是我们认为每个人都应该牢记的几个基本步骤。当然,你应该采取的步骤会根据你的控制器的类型而有所不同。下面的步骤是以Allen Bradley CompactLogix控制器为基础,为那些可能认为自己不是数学家的人设计的。
- 写下你当前的PID设置。
- 通过让炉子在当前的PID设置下进行一个完整的循环来进行报警测试。要做到这一点,你将以与你的典型生产速度相一致的方式对炉子进行升温,然后在所需的设定点周围进行浸泡。
- 如果当前的PID设置不能提供预期的结果(例如,过程变量[PV]的振荡或对预期设定点的过激反应),把你的PID数字切成两半。然后再运行一个完整的周期,看看结果是什么。你想看到的是,炉子的实际温度越来越接近所需速率和变化的设定点温度。然而,如果它变得更远,那么这表明你应该把原来的PID设置增加一倍。
- 重复这个逐步调整的过程,直到达到理想的效果。
注意事项:一定要确保让炉子循环,等待看看原因和效果,然后再进行调整。
对于那些数学家来说,这里有一个实现理想PID形式的PI控制器调谐关联性:
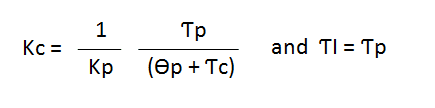
Kc = 控制器增益(调谐参数)。
Kp = 进程收益(多远)
Өp = 死锁时间(有多大的延迟)
Ƭp = 时间常数(有多快)
Ƭc = 闭环时间常数
ƬI = 复位时间(调谐参数)

在利用这种调谐相关性时,你还应考虑到热电偶尺寸与使用这些规则的性能:
- 侵蚀性:Ƭc是0.1Ƭp或0.8Өp(用于温度较低的应用<800°F)中较大的一个。
- 适度:Ƭc是1.0Ƭp或8.0Өp中的较大者(对于温度较高的应用>800°F)。
PID调谐往往是一个不断试验和错误的过程。但是,通过了解这三个基本组成部分之间的关系和对预期结果的影响,以及有几个基本步骤要记住,这个过程将被大大简化。
如果你在PID调整方面需要进一步的帮助,请联系Ipsen,地址是 1-844-GO-IPSEN.